Содержание
Жёсткой классификации электродвигателей нет, но различать их можно по нескольким параметрам. Основные - тип питания и наличие скользящего контакта. Эти позиции можно считать ключевыми и по ним проще ориентироваться. В общем-то, видов электродвигателей не так и много - синхронные, асинхронные, постоянного тока, вентильные. Вот, пожалуй, всё. Другое дело, что в большинстве "категорий" есть достаточно вариантов, которые значительно меняют свойства и характеристики. Но с этим придётся разбираться применительно к каждой конструкции.
Итак, рассмотрим виды электродвигателей по виду питающего напряжения. Они бывают:
- постоянного тока;
- переменного тока:
- однофазное питание;
- трехфазное питание;
- универсальные.
Пояснений требует только универсальный тип. Такой электродвигатель может работать как от постоянного, так и от переменного напряжения. По сути, один вид - универсальный коллекторный двигатель с обмотками возбуждения. К двигателям переменного тока относятся синхронные, асинхронные. На постоянном токе работают коллекторные и вентильные.
По способу передачи электропитания все электродвигатели можно разделить на две группы:
- с коллектором (щёточные);
- без коллектора (бесщёточные).
Бесщёточные электродвигатели требуют меньше обслуживания, работают тише, более надёжны. К ним относятся асинхронные с короткозамкнутым ротором (работают от переменного напряжения), вентильные (питаются постоянным напряжением). Остальные имеют коллектор и щётки, через которые на обмотки катушек подаётся напряжение.
Постоянного тока
Двигатели постоянного тока появились еще в конце 19 века. С некоторыми изменениями они используются и сегодня и притом они популярны. Например, вибрирование в современном смартфоне обеспечивает именно двигатель постоянного тока, очень маленький и мощностью в милли ватты, но все же. В большей части игрушек тоже стоят такие движки. Но это не значит, что их не используют в серьёзной технике, ещё как используют. Самые мощные стоят в качестве тяговых на электровозах. У них мощность исчисляется сотнями киловатт (больше 800), а питаются они от напряжения 1,5 кВ.
- Коллекторные
Коллекторный двигатель постоянного тока, как и все другие, состоит из неподвижной (статор) и подвижной (якорь) части. На статоре установлены магнитные полюса. Для маломощных моделей ставят постоянные магниты, для мощных добавляют обмотки (называются обмотками возбуждения), которые усиливают магнитное поле. Ротор представляет собой магнитопровод из металлических пластин, в пазы которого уложены витки медного провода - роторные обмотки. - Универсальный
В большей части бытовой техники, которая работает от сети, стоит универсальный коллекторный двигатель. Его отличия от описанного выше незначительны. Как может одна и та же конструкция работать и на постоянном и на переменном напряжении? Всё из-за того, что в этой машине взаимодействуют магнитные поля полюсов и роторных обмоток. Все знают, что поменять направление вращения якоря просто: надо изменить полярность на полюсах или на роторе. А что получится, если их поменять сразу и там, и там? Ничего. Якорь продолжит движение в прежнем направлении. На этом и основана работа коллекторного электродвигателя на переменном токе.
Достоинства, недостатки, область применения
Почему коллекторные двигатели ставят в большей части бытовой и строительной техники? На то есть несколько причин. Первая: они могут разгоняться до высоких скоростей - до 10 тыс.об/мин. По сравнению с 3 тыс. об/мин, которые развивают асинхронные их ближайшие конкуренты, а это очень неплохо. Вторая причина популярности - ими легко управлять. Частота вращения напрямую зависит от приложенного напряжения, а момент от тока якоря. До появления полупроводников и создания частотных преобразователей, это был единственный тип электродвигателей, который позволял легко и достаточно точно управлять скоростью. Третья причина широкого применения, несложная конструкция и относительно небольшая цена. Четвёртая - они могут иметь хороший крутящий момент даже на небольших оборотах.
Все эти свойства определили широкую область применения коллекторных двигателей постоянного тока. Они стоят на стиральных машинах, в дрелях, миксерах и т.д. Везде, где требуются высокие скорости, возможность плавной регулировки, хороший крутящий момент.
Но наличие щеток, которые искрят и стираются, вносит свои коррективы. Этот узел требует постоянного ухода, часто щетки приходится заменять, коллектор чистить. Кроме того, он является причиной ещё двух неприятных моментов. Первая - шумная работа. Для строительной техники или промышленного оборудования это, возможно, и не очень критично, но для бытовой - существенный минус. Вторая неприятность - щетки перескакивают с одной пары на другую, так что потребление тока получается импульсным, что плохо влияет на параметры питания и создаёт радиопомехи. Это оказывает влияние на работающие рядом приборы с радиоуправлением. Это не только игрушки, но и разного рода пульты ДУ. Для сглаживания этих скачков на входе ставят конденсаторы, они сглаживают пульсации и убирают помехи.
Вентильные электродвигатели
Эти двигатели называют ещё вентильно-индукторными, безколлекторным или безщеточными. Бывают вентильные двигатели двух типов - "обычный" и с самовозбуждением. Причем отличаются и по устройству и по функциям.
- Вентильно-индукторный двигатель
Если сравнивать виды электродвигателей по размеру, вентильные будут самыми маленькими. Что характерно, работают они от постоянного тока, причём питаются им статорные обмотки, ротор обмоток не имеет, а сделан из постоянных магнитов. Причём и ротор, и статор имеют зубчатое строение. В "комплект" входит датчик холла, небольшой современный контроллер, который определяет положение ротора и в зависимости от его положения подаёт питание на ту или другую пару обмоток на статоре. То есть, вентильный двигатель управляется при помощи электронного прибора. - С независимым возбуждением
Этот вид электродвигателей стоит выделить отдельно, так как он значительно отличается как по устройству, так и по характеристикам и области применения. Начнём с того, что ротор состоит из двух отдельных магнитных пакетов, разнесённых на некотором расстоянии друг от друга. Полюса двух пакетов ориентированы так, чтобы результирующий момент был равен нулю (согласованное положение). Обмотка возбуждения крепится к статору хотя и обмотана вокруг ротора, но его она не касается. Магнитная система статора также собрана из металлических пластин. По характеру трёхфазная распределённая, три фазных обмотки со смещением друг относительно друга на 120°. Обмотка статора по размерам слегка больше либо равна собранному ротору (оба пакета охватывает магнитное поле).
Чем хорош этот вид электродвигателей? Плюсов много. Легко управлять скоростью вращения, как у синхронных машин с обмоткой возбуждения, доступно векторное управление. Можно увеличивать или уменьшать скорость, регулировать момент. В нём нет магнитов, которые стоят немало, да ещё могут размагнититься. И еще один плюс, нет коллектора и щеток. Минус, все-таки есть. Этот вид электродвигателей нельзя запитать напрямую от сети - требуется преобразователь. И ещё, он имеет более сложную конструкцию, чем описанный выше вариант. Зато крутящий момент более плавный и практически линейный.
Переменного тока
Электрические двигатели переменного тока бывают синхронными и асинхронными. Чем отличаются эти виды электродвигателей? Разница в том, что у синхронных ротор вращается с той же скоростью, с которой изменяется поле статора, в асинхронных моделях скорость ротора отличается.
Асинхронный двигатель переменного тока
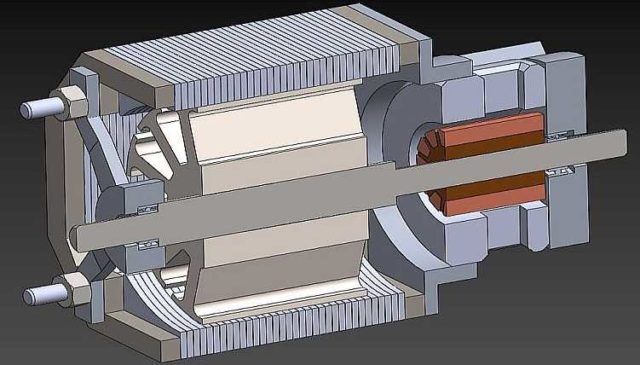
В устройствах, которые питаются от трехфазной сети обычно ставят асинхронные движки. Так, что на производстве стоят именно они. В этих машинах в статор отдельная электромагнитная система. Внутрь корпуса вставляются пластины, в пазах которых располагаются фазные обмотки. Обычно фаз в статоре три, но может быть две, а может и много.
Ротор может быть двух типов - короткозамкнутый или фазный. Короткозамкнутый может быть цельнометаллическим (последние модели) или состоять из "беличьей" клетки с залитыми алюминием промежутками между стержнями клетки. Ротор вставляется в статор, между ними оставляют минимальный зазор, не более пары миллиметров даже для самых мощных. На статор подается напряжение, которое формирует вращающееся магнитное поле. Ротор попадает в зону действия магнитного поля, в нем наводятся токи. Результирующее поле имеет определённое направление, так что ротор начинает вращение. Так как поле возникает путём индукции, электрического контакта ротора со статором нет, нет коллектора и щеток. Вал фиксируется только в крышках статора на подшипниках. Этот двигатель относится к группе бесщеточных (безколлекторных).
Асинхронный двигатель с фазным ротором имеет коллекторный узел. На вал надевают магнитопровод из наборных пластин с ячейками под три фазные обмотки. Питание на обмотки подаётся через коллекторный узел, в них поочерёдно возникает магнитное поле, которое вкладывается с магнитным полем статора. Благодаря этому возникает вращение.
![]()
Особенности однофазных моделей
В однофазном асинхронном двигателе в статоре располагают две обмотки: она фазная, вторая вспомогательная или стартовая. Она нужна для "разгона" ротора, чтобы придать ему начальное вращение. Для обеспечения "отставания" включается стартовая обмотка через конденсатор. Так что часто такой тип асинхронника называют конденсаторным двигателем. Хотя, по сути, двигатель всё тот же асинхронный, но двухфазный.
Такие двигатели не могут развивать достаточного крутящего момента, потому применяются там, где это не требуется, например в вытяжных вентиляторах. Другие виды электродвигателей в этой области не применяют, так как большой крутящий момент тут излишен.
Достоинства, недостатки, область применения
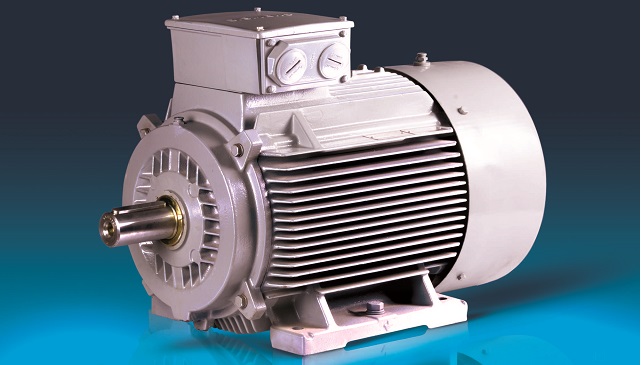
Как уже говорили, асинхронные двигатели популярны и в основном модели с короткозамкнутым ротором. Плюсов несколько. Первый - нет коллектора, что упрощает конструкцию, мотор требует более простого и редкого обслуживания. Второй - их можно подключать к сети напрямую. Во время старта потребление тока сильно возрастает (в 3-7 раз по сравнению с номинальным), го такие перегрузки допустимы. Третий - конструкция проста и следовательно недорога.
- Область применения асинхронных двигателей промышленные процессы, оборудование. Особенно там, где нет необходимости в высоких скоростях и в изменении скорости. Максимальная скорость, которую может развить подобный движок - 3 тыс. об /мин. Не так много, но для большинства оборудования достаточно. Регулируется скорость у такого движка слабо. Можно понизить напряжение и скорость уменьшится. Но если напряжение будет слишком низким, вырастет отставание скорости ротора от скорости магнитного поля, что приведёт к перегреву и двигатель может перегореть.
- В настоящее время решена проблема регулирования скорости асинхронных двигателей. Их используют совместно с преобразователями частоты, подавая напряжение с них или встраивают этот блок в конструкцию, получая так называемые инверторные двигатели. В большинстве случаев, это именно асинхронники, питание которых осуществляется через встроенный преобразователь. Что позволяет менять скорость в ещё более широких пределах, чем это позволяет делать двигатель постоянного тока. Причём может регулироваться и момент, уходит проблема стартовых токов, выключать движок тоже можно "мягко".
Синхронные электродвигатели
Статор синхронного двигателя переменного тока сделан практически так же, как и асинхронного. Разница между ними в устройстве ротора. Он состоит из постоянных магнитов. Они могут быть закреплены на поверхности или встроены внутрь. Так что виды электродвигателей, синхронный от асинхронного, можно отличить по ротору.
Когда на обмотки статора подаётся питание, возникает вращающееся магнитное поле. Магнитное поле ротора постоянное и при их взаимодействии возникает крутящий момент, который и "проталкивает" ротор. Во время работы постоянное поле магнитов на роторе "сцепляется" с вращающимся магнитным полем статора, потому их скорости вращения одинаковы и скоростью ротора легко управлять. Но это явление затрудняет пуск. Ротор "сцепится" с полем статора только, если будет иметь ту же скорость.
У синхронных электродвигателей есть одна проблема - их сложно завести. Скорость вращения ротора должна быть равна скорости поля статора или так, или никак. Сразу, со старта он развить такую скорость просто не может, потому поле статора просто "соскальзывает". В результате ротор, при старте просто подрагивает, но не вращается. Говорят двигатель "не синхронизировался". Проблема обычно решается устройством на роторе специальной пусковой обмотки асинхронного типа. С её помощью вал разгоняется, затем пусковая обмотка отключается, а постоянное поле магнитов синхронизирует частоту вращения.

Достоинства, недостатки, применение
Как вы уже, наверное, поняли, скорость синхронного двигателя никак не регулируется. В смысле, можно изменять скорость магнитного поля статора, а оно зависит от частоты. До изобретений полупроводниковых приборов это было сложно, хлопотно и неэффективно. Несмотря на стабильность работы, простоту конструкции, применялись они мало. Во-первых, трудно запустить; во-вторых, нет возможности регулировать скорость. Другие виды электродвигателей были более популярны.
С изобретением частотного преобразователя проблема исчезла. Частоту трехфазного тока с их помощью можно менять от 1 Гц до 500 Гц, так что и пределы регулировки асинхронного двигателя тоже могут быть более чем значительны. Причем характеристики этой "пары" практически такие же, как и у двигателей постоянного тока. Потому сейчас синхронные двигатели с частотными преобразователями активно заменяют другие виды электродвигателей, например, ставят вместо коллекторного привода. Пример тому стиральные машины с прямым приводом, кулеры охлаждения. Стали менять и двигатели постоянного тока, появились новые электропоезда с синхронными двигателями и частотными преобразователями.
Виды электродвигателей: какой лучше
Описаны только основные виды электродвигателей и даны краткие характеристики, очень сжато описано устройство и принцип работы. Тем не менее, уже можно сделать выводы о том, что идеального решения, причём для всех случаев, просто нет. Есть наиболее подходящее для каждого конкретного случая.
- Асинхронный электродвигатель без частотного регулирования - лучший выбор для насосов.
- Коллекторный двигатель с его регулируемыми скоростями вне конкуренции для дрелей и пылесосов. И то, в последнее время стали делать с вентильными, они без щеток, что делает работу тише, срок службы дольше, хотя цену выше. Так что, тут, как посмотреть.
- Для вентиляторов с длительным режимом работы выбирать приходится между асинхронных и вентильных. Но только если они не слишком мощные. Для мощных важным является возможность разделения на секции, а это проще реализовать у вентильных. И даже на кулерах стали в последнее время использовать вентильные с магнитным ротором.
В общем, чтобы ответить какой лучше, надо рассматривать совокупность условий и характеристик работы. Принимать во внимание достоинства и недостатки, перебирать все виды электродвигателей и только так можно найти оптимальный.